|
Welcome to my portfolio! I am a robotics engineer and researcher with a passion for advancing autonomous mobile robot technologies. My expertise lies in developing robust navigation stacks that empower robots to operate autonomously in diverse environments. With a strong background in both theoretical research and practical implementation, I am committed to pushing the boundaries of what autonomous systems can achieve.
|

|
|
|
|
|
Dissertation: Motion Planning for Snake Robots |
|
|
Graduated with High Distinction |
|
|
|
|
Micropolis Robotics Dec. 2023 - Present
|
|
|
Vision and Robotics Lab Sep. 2018 - Dec. 2023
|
|
|
Middle East Airlines Apr. 2017 - May 2017
|
|
|
Student Technology Club Jan. 2015 - Jan. 2017
|
|
|
 |
Python |
 |
C++ |
 |
Matlab |
 |
Mathematica |
 |
Git |
 |
Linux |
 |
ROS/ROS2 |
 |
PyTorch |
 |
SolidWorks |
 |
Keras |
 |
Gazebo |
 |
Webots |
 |
Isaac Sim |
|
|

|
Keywords: Motion planning; optimization; collision avoidance; redundant systems; shape control; Mathematica My Ph.D. research focuses on developing optimal motion planning algorithms for several hyper-redundant snake robots whose locomotion models relate to biological snakes. I strive to understand how snakes locomote on various terrains in order to project their locomotion advantages onto snake robots. I developed several motion planning algorithms for various snake robot classes, in particular, for wheeled snake robots, snake robots floating in space, and snake robots swimming in viscous environments. The motion of each of these snake robot classes is governed by unique dynamic relations. In my work, I analyze the dynamics of these systems aiming to propose optimal motion planning algorithms that allow the snake robots to perform desired motions while avoiding collision in its environment. |
||
|
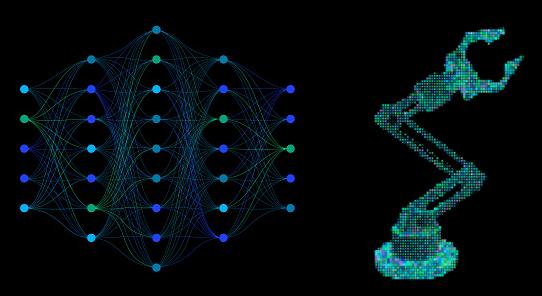
Keywords: Deep Learning; Neural Networks; Inverse Kinematics; Python I developed a fully-connected neural network to solve the inverse kinematic problem for a two degrees of freedom planar robotic manipulator. The network architecture is composed of an input layer having 3 neurons, two hidden layers having 50 neurons each, and an ouput layer having 4 neurons. The input and hidden layers are activated with a rectified linear activation function. The input to the neural network is the desired X and Y coordinates of the end effector as well as the euclidean distance bewteen the end effector and the origin of the inertial frame. The output of the network is the cosine and sine of each joint variable. The test root mean squared error of the model is 0.0004. |
||

|
Keywords: PID control; autonomous boats; brushless motors; Arduino I developed a 3D printed autonomous robotic boat that transports cargo units across a swimming pool. The developed boat autonomously navigates the swimming pool while avoiding static obstacles located in its way. The robot was designed on SolidWorks and controlled using an Arduino micro-controller. The robot was developed to participate in the Engineering Design Challenge 1.0 held at the American University of Beirut in 2016.
|
||
|
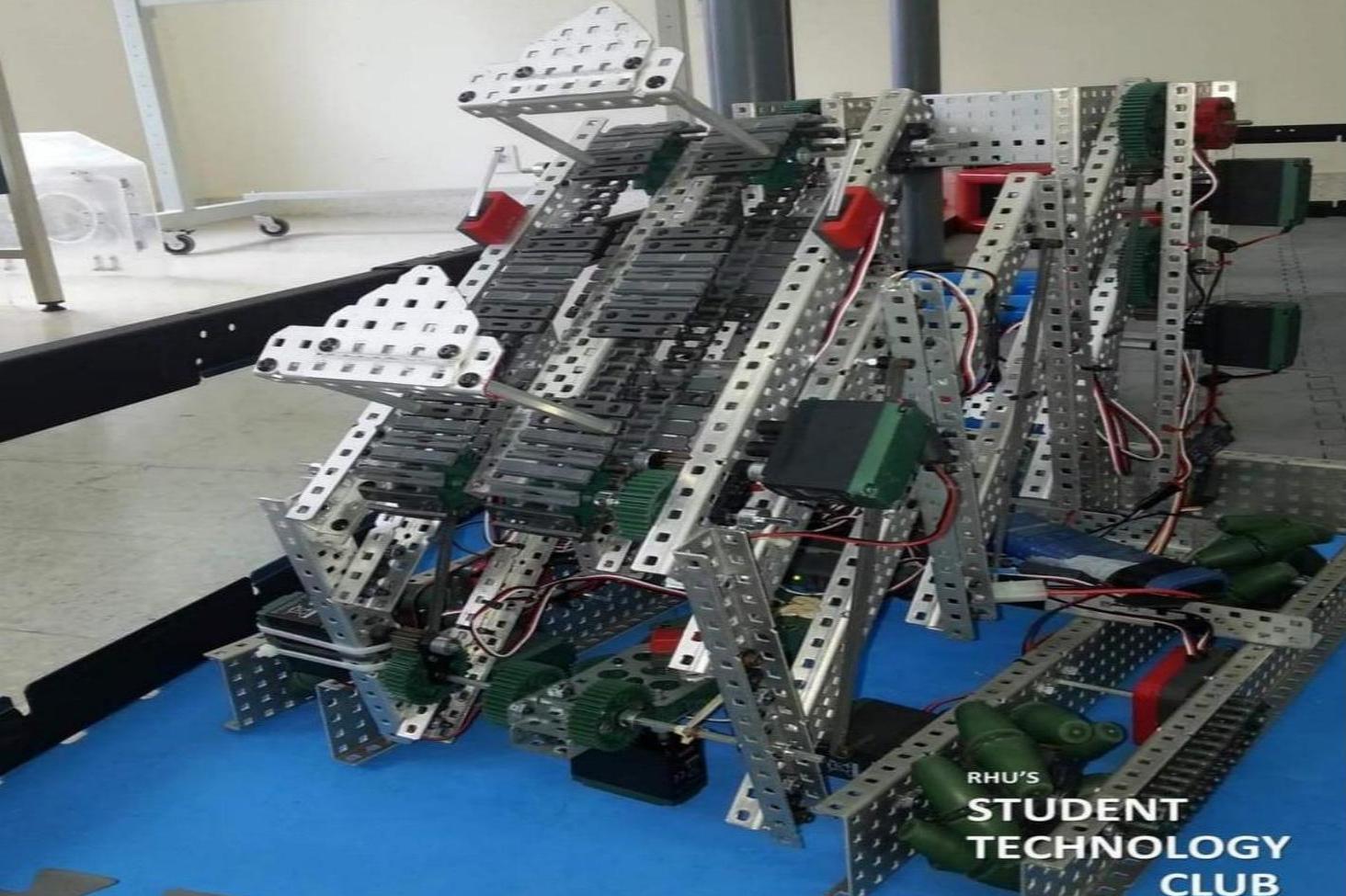
Keywords: Mobile robots; mechanical design; VEX I developed a mobile robot for building mini-skyrises from plastic rods and cubes. The robot operates in both remote controlled and autonomous modes. The robot was built using the VEX-U kit and controlled using the VEX Cortex micro-controller. The robot was developed to participate in the VEX Robotics 2015 competition.
|
||
|
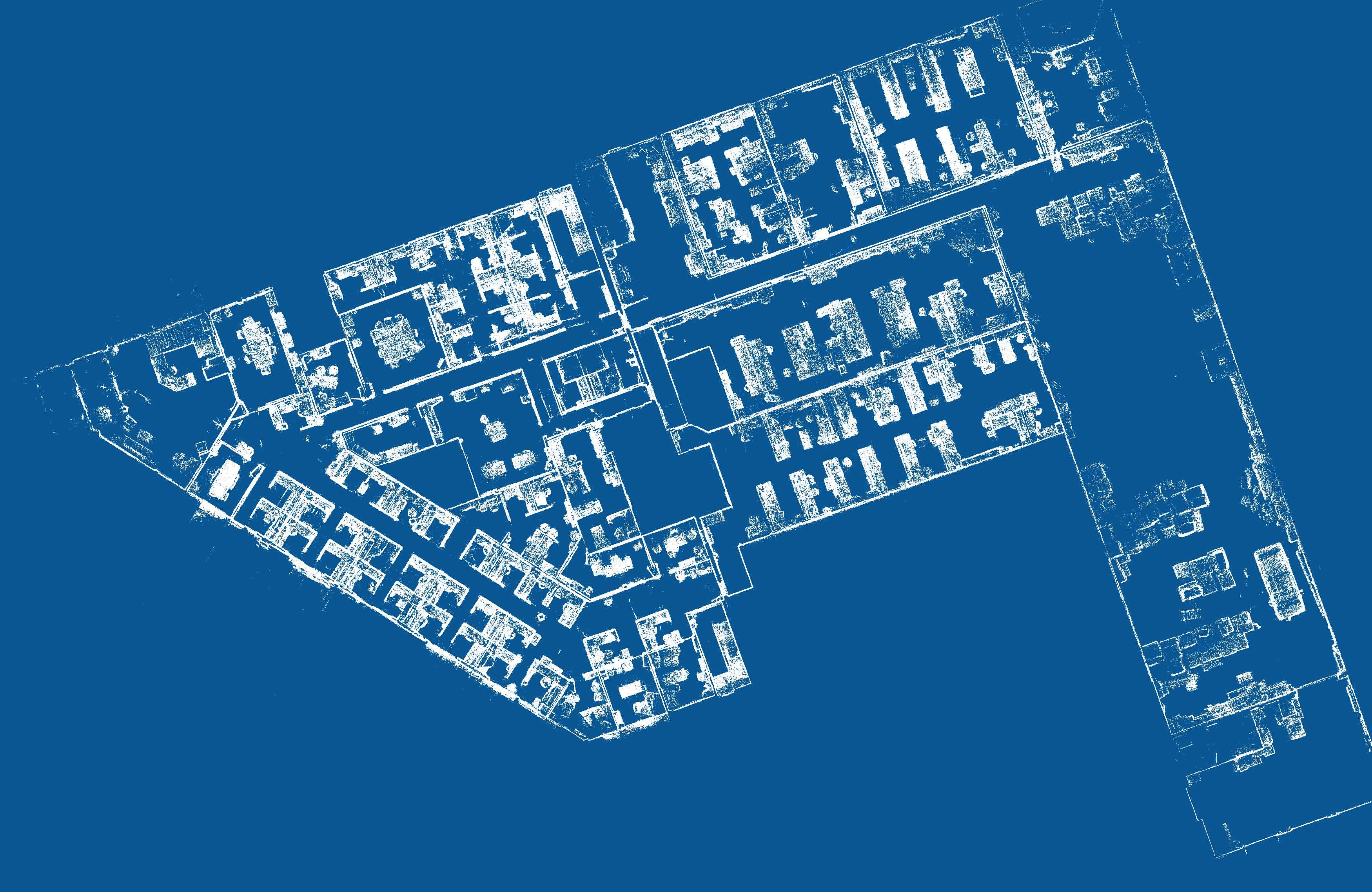
Keywords: Simultaneous localization and mapping; Monte Carlo localization; particle filter; ROS; Gazebo As robots autonomously explore new places, it is essential for them to simultaneously draw maps of their surroundings and localize themselves in these maps. In this project, I develop a Simultaneous Localization and Mapping algorithm to guide the navigation of mobile robots, in which a particle filter is implemented to estimate the pose of the robot based on both its odometry (wheel encoders) and data extracted from its lidar. I simulated the developed algorithm on the ClearPath Husky robot in Gazebo. |
||

|
Keywords: Recommendation Systems; Matrix Completion; Stochastic Gradient Descent; Matlab I developed a content-based movie recommendation system using the matrix completion approach and stochastic gradient descent. The system takes a dataset of movie ratings provided by users as input. However, since it is impractical for all users to have watched and rated every movie, the dataset is incomplete. Based on the available ratings, the system predicts the expected rating for all unwatched movies for each user and recommends the movies with the highest predicted rating. To achieve this, the system utilizes matrix factorization techniques to recover the ratings and make predictions for new ones. The implementation involves the application of Stochastic Gradient Descent to solve the matrix completion problem efficiently. To assess the performance of the developed system, a Root Mean Square Error metric is used, measuring the accuracy of the predicted ratings. Furthermore, the recommendations made by the system are post-analyzed to provide insights into the system's performance. |
||
|
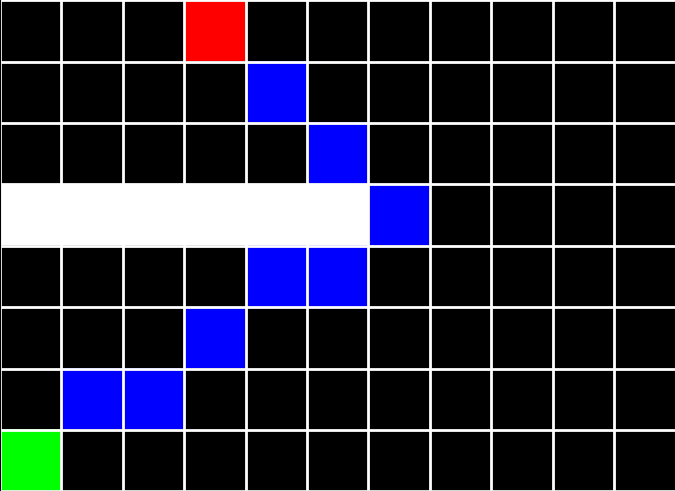
Keywords: Path planning; graph-based search algorithms; sampling-based search algorithms; python As my research focuses on the motion planning and path planning of mobile robots, I have built a solid background in these fields. Here, I present my implementation of several graph-based and sampling-based search algorithms including the Djikstra, A*, and RRT algorithms. The presented implementation also allows to visualize the performance of the algorithms in a dynamic manner, i.e., simulation video. |
||
|
|
Keywords: Deep Learning; convolutional neural networks; python; tensorflow Understanding the relationship between fashion items based on their visual characteristics is fundamental to making informed and satisfying shopping choices. People often seek complementary items that enhance their existing wardrobe pieces, however, the plenty of options available online can overwhelm shoppers, leading to a less satisfying shopping experience. This project aims to simplify the online shopping experience by helping users find, in a single click, a complementary fashion item that matches an item they already own. The developed solution employs a convolutional neural network to extract features from the user-provided product's image. These features are then utilizes to compute a similarity metric between the user's image and the fashion items in our dataset. The most similar item, i.e., the item with the least cost, is then recommended to the user. A website is built to help shoppers use the recommendation system. Disclaimer: This project was done as part of my participation in the Amazon Industry Program 2023. |
||
|
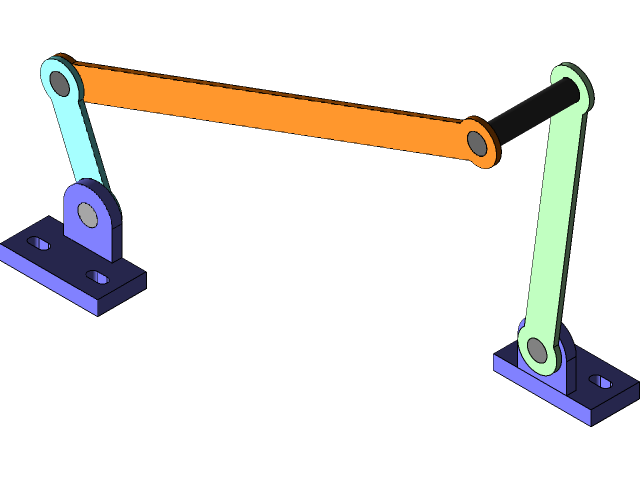
Keywords: Search Algorithm; optimization; MATLAB Four-bar mechanisms are widely used in the industry to transform rotational motion into a reciprocating motion, however, careful synthesis of these mechanisms is important to produce a desired output motion. In fact, if the number of precision points (waypoints) defining the mechanism's output motion is huge, the synthesis of the mechanism might require optimization. In this work, a search algorithm is proposed to optimize the synthesis of four-bar mechanisms, that is, given a desired path defined by a set of precision points, we present a Dynamic Ant Search algorithm to find the optimal set of parameters for a four-bar mechanism to generate the desired path. |
|
|
|
O. Itani, E. Shammas, and D. Abou Jaoude, “Optimal reorientation of planar floating snake robots with collision avoidance.” Robotics and Autonomous Systems 178, pp. 104711, 2024. O. Itani, E. Shammas, and D. Abou Jaoude, “Motion planning of planar snake robots in viscous environments.” In American Control Conference, pp. 550-555, 2022. O. Itani and E. Shammas, “Motion planning for redundant multi-bodied planar kinematic snake robots.” Nonlinear Dynamics 104, pp. 3845-3860, 2021. O. Itani and E. Shammas, “Motion planning for a redundant planar snake robot.” In IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 1483-1488, 2020. N. Diab, O. Itani, A. Smaili, "Optimum Synthesis of Rigid Mechanisms Using a Dynamic Ant-Search Method With Sensitivity Analysis." In ASME International Mechanical Engineering Congress and Exposition, 2019. R. Alkhatib, M. Diab, O. Itani, C. Chamaa, and M. Sabbah, "Usage of VGRF in Biometrics: Application on Healthy and Parkinson Gaits." In International Conference on Computer Applications & Information Security, 2018. |